Door de snelle groei van de drone-markt in de afgelopen jaren worden drone-sensoren steeds meer gemeengoed en dus betaalbaarder. Aangezien de meeste toepassingen een steeds hoger niveau van veiligheid en automatisering vereisen, investeren veel bedrijven in de ontwikkeling van goedkope, lichtgewicht en betaalbare sensoren voor situational awareness. In dit artikel geven we een overzicht van de types van sensoren die er beschikbaar zijn en hun sterke en zwakke punten.
Men kan 2 categorieën sensoren onderscheiden, de akoestische golvende sensoren zoals ultrasone sensoren die bekend staan om hun goedkope prijs, gewicht en compactheid en de elektromagnetische golvende sensoren die actief kunnen zijn zoals Lidars en Radars of passief zoals camera’s. De meeste in de handel verkrijgbare ultrasone sensoren meten momenteel slechts in één dimensie, terwijl andere sensoren de wereld in 2 of 3 dimensies registreren.
LiDAR’s en RaDAR’s hebben een groot bereik, tot 100 m of meer, en een goede hoekresolutie, maar zijn duur, omvangrijk en energieverslindend. Camera’s daarentegen zijn goedkoop, licht van gewicht en hebben een bijzonder goed gezichtsvermogen, maar zijn minder nauwkeurig in het verschaffen van lokalisatie-informatie en zijn gevoelig voor de omgeving. De tabel geeft een overzicht van de sterke en zwakke punten van verschillende soorten sensoren.
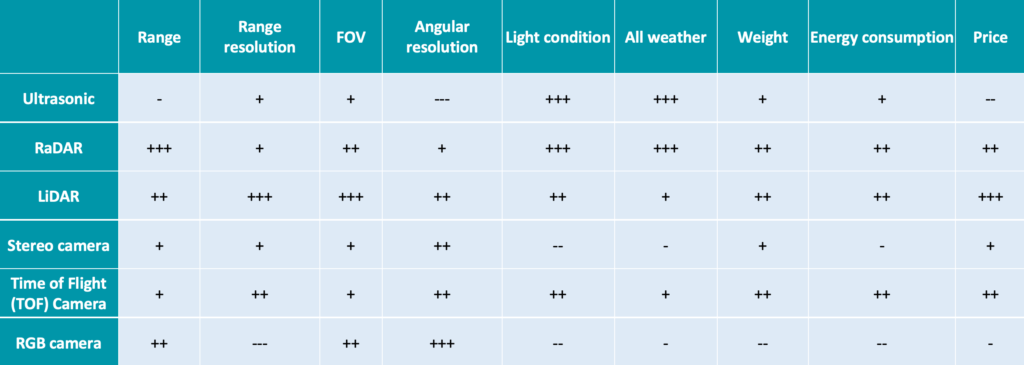
De meeste toepassingen berusten op de combinatie van 2 of meer soorten technologieën om de sterke en zwakke punten van de verschillende soorten sensoren in evenwicht te brengen. Men zou bijvoorbeeld kunnen denken aan ultrasone sensoren voor obstakeldetectie en -lokalisatie op korte afstand, en een camera gemonteerd op een gimbal voor obstakelidentificatie of toepassingsgerelateerde taken. De combinatie van een LiDAR of een RaDAR met een camera zou soortgelijke functies bieden met de mogelijkheid om afstanden en positie te meten op een groter bereik ten koste van een zwaarder, omvangrijker, en dus duurder systeem.
Bij het overwegen van een waarnemingssensor voor een drone moeten verschillende specificaties in aanmerking worden genomen. Deze kunnen worden onderverdeeld in twee categorieën, de specificaties met betrekking tot de toepassing en die met betrekking tot de drone. Het gewicht van de sensor, de grootte en het stroomverbruik hebben een grote invloed op de payload, de autonomie en de kosten van de drone.
De specificaties met betrekking tot de toepassing zullen een sleutelrol spelen in de mogelijkheden van het uiteindelijke systeem en moeten in perspectief worden geplaatst van de drone-gerelateerde specificaties. De best presterende en meest nauwkeurige sensor zal waarschijnlijk omvangrijker zijn en een hoger stroomverbruik hebben.
Wanneer men bijvoorbeeld overweegt om de stereocamera te upgraden van de Intel D435 naar de D455, moet niet alleen rekening worden gehouden met de toename van de prestaties (bereik, nauwkeurigheid, resolutie…) maar ook met de toename van het gewicht (+43%) en uiteindelijk het stroomverbruik. Dit kan gevolgen hebben voor het laadvermogen van de drone en dus ook voor zijn autonomie, die daardoor meer dan acceptabel zou kunnen afnemen.
Van de meest geschikte sensoren voor drone-toepassingen kunnen we de volgende noemen:
| Category | Sensor | Price | Weight(g) | Size
(mm) |
Power | range | Accuracy | FOV | Comment |
| Ultrasonic | maxbotix | 25€ | 8g | 38x22x14 | 18mW | 2cm – 5m | 1% of Range | 1D | |
| elecfreaksHC-SR04 | 3.96$ | 45x20x15 | 75mW | 2cm – 4m | 3mm | 15 ° | 1D
|
||
| Radar | Texas instrument | ~400€ | 12.5W | 15 m | Az: ± 70
El: ± 40 |
||||
| Lidar | Velodyne Velarray H800 | 500$ | 200 m | 120°x16° | |||||
| Sick | 11 994$ | 770g | 91x164x88 | 8W | 0.5 – 320m | 85°x3.5° | |||
| LiDAR with camera | DJI Zenmuse L1 | 10 351€ | 900g | 152x110x169 | 30W | 450m | 3 cm @100m | 70°×77° | |
| 1280×960 | |||||||||
| Intel L515 | 589$ | 95g | 61x61x26 | 3.3W | 0.25 – 9m | 14mm @ 9m² | 70°x55° 1024×768 | indoor | |
| 69°x42°
1920×1080 |
Camera is rolling shutter | ||||||||
| Stereo camera | Intel D455 | 399$ | ~103g | 124×26×29 | 0.6 to 6m | 2% @ 4m² | 87°x58°
1280×720 |
||
| 90° × 65° 1280 × 800 | Camera is global shutter | ||||||||
| Intel D435 | 329$ | ~72g | 90×25×25 | 0.3 to 3m
|
<2% at 2 m2 | 87° × 58°
1280 × 720 |
|||
| 69° × 42°
1920 × 1080 |
|||||||||
| Stereolabs ZED 2 | 449$ | 166g | 175x30x33 | 1.9W | 0.3 to 20m | 5% @ 15m | 110°x70°
2208×1242 |
Camera is rolling shutter | |
| Open cv | 299$ | 361g | 130x101x31 | 5.5 | 0.19 to 38.4m | 1280×800 | |||
| 4056×3040 | |||||||||
| TOF camera | Terabee 3Dcam | 250€ | 83g | 54x53x24 | 4W | 0.2 to 4m | 1% of Range | 74° x 57°
80×60 |
Indoor |
| Microsoft Kinect v2 | 199$ | 1400g | 66x249x67 | 0.5 to 4.5 m | ~6mm | 70°x60°
512×424 |
|||
| 1920×1080 |
In de bovenstaande tabel worden verschillende technologieën en hun specificaties belicht. De lijst is niet volledig, maar geeft inzicht in de huidige sensoren op de markt en hun prijs en prestaties. In dit overzicht hebben we ons geconcentreerd op flash LiDARS, die doorgaans compacter zijn en minder energie verbruiken dan de roterende LiDAR die in de auto-industrie wordt gebruikt. Zij zijn daarom meer geschikt voor drone-toepassingen. Merk op dat Intel de ontwikkeling van sommige van de realsense sensoren zal stopzetten.
Verder is Velodyne van plan om tegen het vierde kwartaal van 2022 een zeer compacte en goedkope (100$) LiDAR op de markt te brengen, die zeer geschikt zou kunnen zijn voor drone-toepassingen. Daarnaast werken bedrijven als Imec ook aan betaalbare compacte RaDAR-sensoren met laag stroomverbruik, zoals de 140-GHz CMOS Radar-on-Chip. Tenslotte verbetert de ontwikkeling van artificiële intelligentie en autonome voertuigen de prestaties en nauwkeurigheid van technieken zoals depth from motion om diepte in te schatten met een enkele RGB camera geplaatst op een bewegend platform.
Bij Flanders Make gebruiken we sommige van deze sensoren zowel voor drone- als niet-drone toepassingen. Bijvoorbeeld, onze toepassing voor het tellen van dozen vertrouwt op de Intel L515 sensor, onze autonome drone navigatie vertrouwt op de intel T265.
 Auteur
Auteur
JEAN-EDOUARD BLANQUART
Jean-Edouard is Research Engineer en werkt bij Flanders Make (Kortrijk, België) in het DecisionS core lab. Hij werkt als Software Engineer voor perceptiesystemen waaronder RaDAR, LiDAR en Camera’s. Hij gebruikt traditionele en artificiële intelligentie technieken om informatie uit de sensoren te halen en innovatieve functies te implementeren. Hij is ook betrokken bij het opstellen van technische B2B voorstellen om de Vlaamse industrie te ondersteunen in haar innovatie.
Contacteer EUKA/Flanders Make voor meer informatie
Updates en nieuwe artikels ontvangen in je mailbox? Schrijf je dan snel in voor onze nieuwsbrief!