
Met de toenemende druk voor een schonere landbouw worden talrijke chemische producten verboden, waaronder ook producten die worden gebruikt om vogels af te weren en zo te voorkomen dat zij de oogst van een jaar arbeid opeten. Boeren zijn dus gedwongen innovatieve oplossingen te vinden om hun teelten te beschermen. Veel gebruikte technieken zijn boomnetten, vogelverschrikkingskanonnen en ballonnen met een groot roofdieroog gevuld met helium. Al deze technieken hebben nadelen. In dit artikel zoeken we uit of innovatieve oplossingen zoals bijvoorbeeld LiDAR-scanners een oplossing kunnen bieden om vogels te detecteren om ze richter te kunnen verjagen.
Hoewel netten effectief zijn, kunnen de verkeerde netten ertoe leiden dat vogels en andere wilde dieren in de netten verstrikt raken. Het is ook vrij arbeidsintensief en duur om grote boomgaarden met netten te bedekken. Vogels raken snel gewend aan het vogelverschrikkingskanon en de ballonnen, zodat deze techniek niet doeltreffend is. Uitgebreidere technieken zijn die met groene lasersystemen die het veld scannen en de vogels afschrikken door de specifieke golflengte van de laser. Dit soort systemen zal naar verwachting de aanwezigheid van vogels met 70% tot 90% verminderen, aldus AVIX Autonomic.
Drones worden ook gebruikt om zwermen vogels weg te jagen die een bepaald gebied als thuisbasis hebben gekozen, maar dat vereist de paraatheid van een piloot ‘in the field’ om de vogels te kunnen verjagen. Een grote winst voor vogelafweersystemen zou kunnen worden behaald wanneer deze systemen alleen actief zouden worden wanneer er vogels aanwezig zijn, b.v. door een camerasysteem en kunstmatige intelligentie te gebruiken om de vogels te detecteren en dan een actie te ondernemen door de laser op de vogel te richten of een signaal te sturen naar een drone die in het veld staat te wachten.
Aangezien het vrij omslachtig is om een AI-algoritme te ontwikkelen dat vogels met een hoge nauwkeurigheid detecteert, onderzocht Flanders Make de mogelijkheid om een LiDAR-sensor te gebruiken om de vogels te detecteren. Voor meer informatie over LiDAR sensoren verwijzen we naar een eerder artikel over sensoren voor drones. Bij een succesvolle detectie, zou het idee dan zijn om de vogels weg te jagen met een autonome drone. De Ouster Lidars OS 0 en OS 1 met de volgende specificaties werden getest:
| OS 0 | OS 1 | |
| LiDAR beam pattern | Uniform | Uniform |
| Number of beams | 128 | 64 |
| Vertical field of view | 90° (± 45°) | 45° (± 22°) |
| Vertical resolution | 0.7° | 0.7° |
| Horizontal resolution | 0.1758° | 0.1758° |
| Range | 50 m | 120 m |
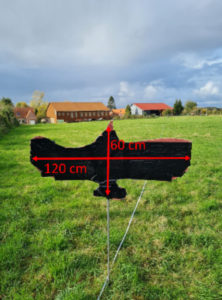
Afhankelijk van de specificatie kan dit type sensoren variëren van 5000$ tot 20 000$. Twee nepvogels van karton werden achtereenvolgens op verschillende afstanden van de LiDAR in een grasveld geplaatst. De spanwijdte van de grote vogel (120 cm) komt overeen met die van een grote kraai en die van de kleine (27 cm) met die van een duif. Van deze soorten wordt verwacht dat zij de meeste schade aan het gewas toebrengen.

Grote vogel (kraai) vs. kleine vogel (duif)
Op korte afstand (10 m) wordt de grote vogel zeer goed gedetecteerd door beide LiDARs.

De vogel werd in stappen van 10 m van de LiDAR verwijderd en het aantal reflectiepunten werd geteld. We kunnen zien dat voor de OS0 het aantal detecties drastisch afneemt tot de vogel niet langer wordt gedetecteerd op een afstand van meer dan 30 m. De OS 1 daarentegen detecteert de vogel goed tot op 50 meter. Daarom werd het experiment voortgezet met alleen de OS 1.

De grote en kleine vogels werden geplaatst op intervallen van 10 meter van 50 tot 100 meter van de LiDAR. Zoals te zien is in de bovenstaande figuur, zijn de vogels bedekt met een zwarte tape. Om de invloed van het type oppervlak en de kleur te evalueren, werden de tests ook uitgevoerd met de grote kraai met een kartonnen afdekking.
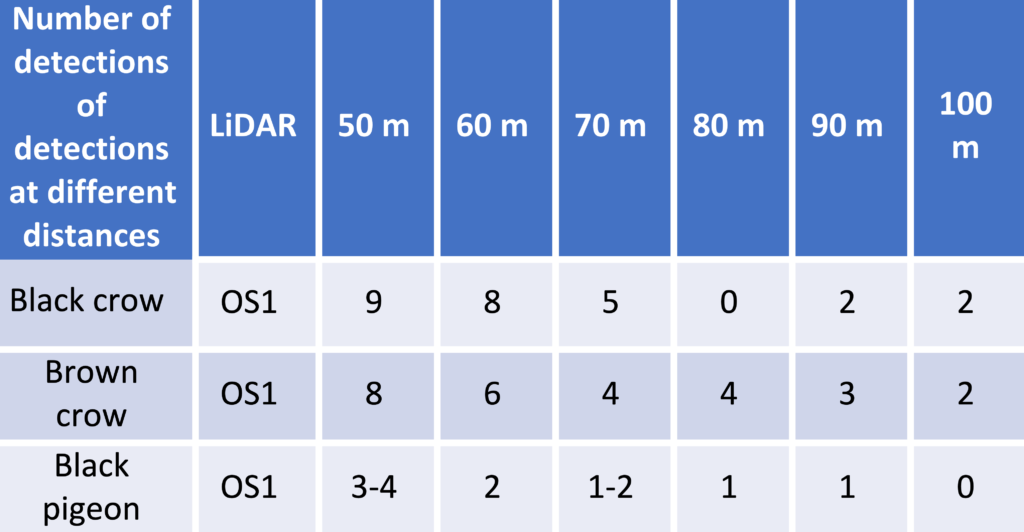
Het is niet duidelijk of het afdektype en de kleur van de vogel een noemenswaardige invloed hebben op het detectierendement van de LiDAR. De afdekking met plakband lijkt echter gunstig te zijn op korte afstand, terwijl de afdekking met karton gunstig is op langere afstand. Het kleinere formaat van het duivensjabloon resulteert in een veel lager aantal detecties, wat te verwachten is.
Op basis van deze eerste test kan worden geconcludeerd dat LiDAR’s voor middellange of lange afstand geschikt zouden kunnen zijn voor vogeldetectie met een bereik van een straal van 100 m. Tijdens de test werd opgemerkt dat als de vogel zich tussen twee lidar-vlakken bevindt, hij mogelijk niet wordt gedetecteerd. De vogels zijn echter alleen problematisch als zij op het veld landen en dus de LiDAR-stralen zullen kruisen. De meest geschikte LiDAR-sensor zou dan een groot bereik hebben, een dicht bundelpatroon met een klein elevatieveld en een hoge verticale en horizontale resolutie. Met de commoditisering van LidAR’s voor toepassingen in de automobielsector worden deze sensoren betaalbaarder, wat deze toepassing ten goede zou komen.
 Auteur
Auteur
JEAN-EDOUARD BLANQUART
Jean-Edouard is Research Engineer en werkt bij Flanders Make (Kortrijk, België) in het DecisionS core lab. Hij werkt als Software Engineer voor perceptiesystemen waaronder RaDAR, LiDAR en Camera’s. Hij gebruikt traditionele en artificiële intelligentie technieken om informatie uit de sensoren te halen en innovatieve functies te implementeren. Hij is ook betrokken bij het opstellen van technische B2B voorstellen om de Vlaamse industrie te ondersteunen in haar innovatie.
Contacteer EUKA/Flanders Make voor meer informatie
Updates en nieuwe artikels ontvangen in je mailbox? Schrijf je dan snel in voor onze nieuwsbrief!