
Binnen de landbouw kijkt men naar drones in de eerste plaats als middel om informatiekaarten van de velden op te bouwen. Hierbij leveren ze een hoge-resolutie alternatief voor satellietbeelden. Drones zouden echter ook “live” ingezet kunnen worden terwijl de landbouwer op de akker aan het rijden is. Zo kan de drone beelden leveren of metingen doen om de efficiëntie of veiligheid van verschillende taken te verhogen. Op die manier kunnen mensen, dieren en obstakels makkelijk vanuit de lucht gespot worden of kan de landbouwer de operaties overzien vanaf een gunstiger standpunt wanneer die zich in een stofwolk bevindt of een complex manoever moet uitvoeren. Twee concrete uitdagingen hierbij zijn dat de drone autonoom moet opereren zodat de landbouwer geen extra werk hiermee heeft, en dat de drone lang genoeg in de lucht kan blijven. Een drone die via een kabel of ‘tether’ verbonden is met de tractor en zo stroom krijgt, leek hiervoor een interessante denkpiste. Onderzoekers bij Flanders Make zochten het uit met een proof-of-concept.

Figuur: Dankzij een kabel kan de drone permanent in de lucht blijven en voor de tractor uitvliegen om de veiligheid en efficiëntie van de landbouwbewerkingen te verhogen. Flanders Make bouwde een proof-of-concept om de haalbaarheid en limieten van zo’n systeem te testen.
Om dit concept te testen stelden onderzoekers bij Flanders Make een systeem samen, bestaande uit volgende voornaamste hardwarebouwblokken:
- Een Elistair Safe-T kabelsysteem, geïntegreerd in een controledoos voor gebruik vanop afstand en ontwikkeld door Dronematrix.
- Een cusom-made drone van 4.6kg met Pixhawk Cube flight controller, Here3 GPS sensor en Intel NUC companion computer.
- Een onbemand grondvoertuig, eveneens uitgerust met Pixhawk Cube flight controller, Here3 GPS en een Raspberry Pi4 als companion computer.
- IR lock sensor en infraroodbaken als precisielandingssysteem.
- Omnidirectionele Ubiquiti 5Ghz long-range wifilink om het systeem vanop afstand te monitoren.
Een simulatie van de drone in combinatie met het kabelsysteem geeft de operationele limieten aan van deze combinatie. Limieten aan het systeem zijn aan de kant van het kabelsysteem de 1800 W aan maximaal vermogen beschikbaar voor de drone, de 80m kabellengte en de 1kg trekkracht dat het oprolsysteem kan aanhouden. Langs de dronezijde is er enerzijds de maximale toelaatbare stuwkracht van (één van) de drone motoren zodat deze niet langdurig overbelast worden en steeds voldoende marge hebben om de drone te stabiliseren en anderzijds de maximaal toelaatbare kanteling van de drone die meestal tussen de 25 en 35° ligt. Tot slot mag de kabel ook niet over het dak van de tractor hangen of over de grond slepen.
Naast de geometrie, het stuwkracht- en propulsiemodel van de drone, houdt de simulatie ook rekening met het eigen gewicht van de kabel van 20.5g/m en de 23% omzettingsverliezen van het kabelsysteem.
Tijdens de simulatie bleken enkel de kabellengte en de eis dat de kabel niet over de grond mag slepen beperkende factoren te zijn voor deze drone met kabelsysteem. Het kabelsysteem kan ingesteld worden met verschillende niveaus van trekkracht op de kabel en rolt automatisch in of uit om deze trekkracht aan te houden. Om de kabel zo recht mogelijk te spannen wordt de maximale trekkracht (1kg) op de kabel gebruikt aangezien de drone hier voldoende sterk voor was. Onderstaande figuur toont hoe de extra trekkracht op de kabel de mogelijke afstand waarmee de drone van zijn basis kan wegvliegen vergroot doordat de kabel minder snel op de grond zal gaan slepen.
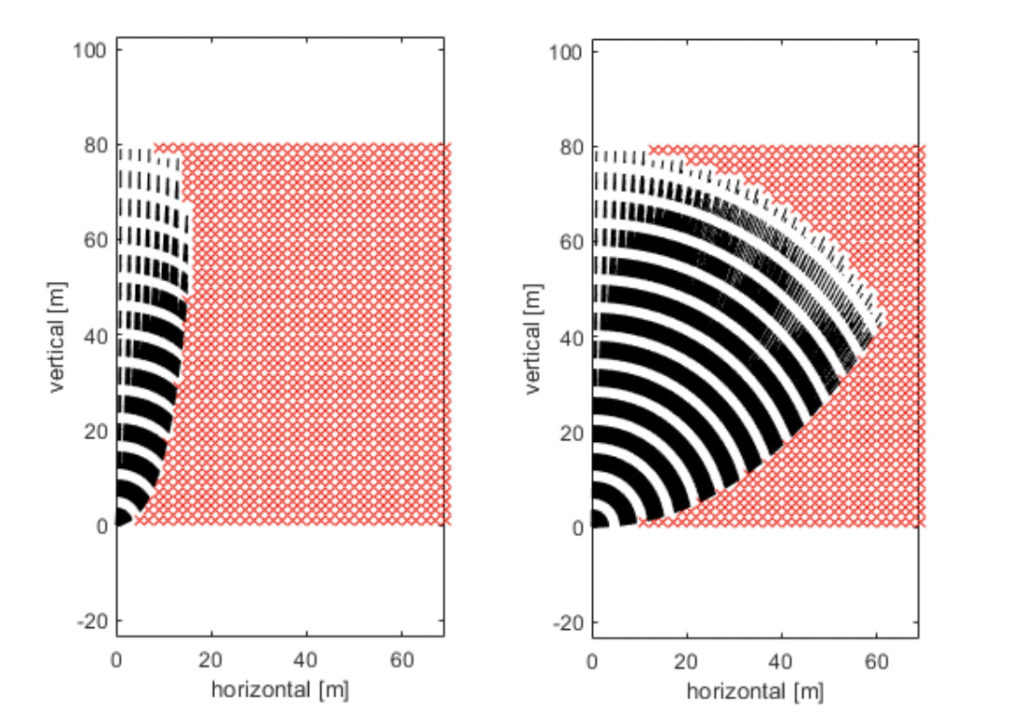
Figuur: De rode posities zijn niet mogelijk met een kabel van maximaal 80m die niet over de grond mag slepen. De hogere trekkracht (1kg) in de rechtse figuur houd de kabel strakker dan in de linkse figuur (100g) en zorgt dat de drone verder van zijn basis kan wegvliegen.
In de uiterste posities van de drone, zullen vanwege de trekkracht van de kabel de motoren ongelijk belast worden. Onderstaande figuur toont hoe dit effect verkleind kan worden door de kabel dicht bij het massacentrum van de drone te brengen ofwel het massacentrum te verlagen zodat het dichter bij het aangrijpingspunt van de kabel komt. Bij de gebruikte drone werd dit bekomen door de vermogenomzetter en reservebatterij beiden onderaan in de drone te monteren, vlak boven het aangrijpingspunt. Een bijkomend voordeel hiervan was de extra afstand tot de GPS en het kompas, dat bleek sterk beïnvloed te worden door de stromen in de omzetter.
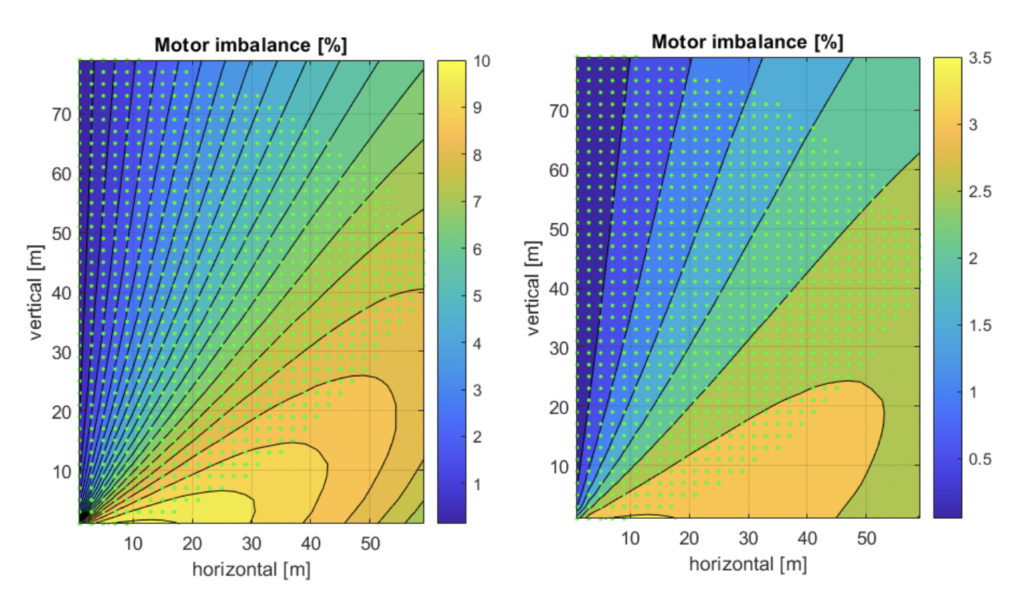
Figuur: Hoe verder de drone wegvliegt van de tractor, hoe meer het propulsiesysteem zal moeten corrigeren voor de trekkracht aan de kabel. Hierbij helpt het om de kabel zo dicht mogelijk bij het massacentrum van de drone te monteren. Op de linkse figuur is dit 20cm en op de rechtse figuur slechts 7cm eronder waardoor de maximale onbalans van 10% tot 3.5% zakt.
Naast de hardwarebouwblokken zijn ook bijkomende softwarebouwblokken ontwikkeld om het hele systeem automatisch te laten werken. Zo is in de eerste plaats een controle nodig van de drone op basis van de bewegingen van het grondvoertuig. Daarnaast moet de drone automatisch kunnen opstijgen en precisielandingen uitvoeren. Tot slot moet de drone nuttige informatie vanuit de lucht tot bij het grondvoertuig krijgen.
Voor de controle is de drone uitgerust met een Pixhawk Cube flight controller waarop “Arducopter” firmware draait. Het grondvoertuig heeft een identieke flight controller die de positie en oriëntatie van het grondvoertuig opmeet. Op basis van de gewenste positie ten opzichte van het grondvoertuig worden waypoints voor de drone berekend. Een Intel NUC companion computer geeft vervolgens deze waypoints door aan de drone controller. Deze eenvoudige en veilige controle op basis van waypoints volstaat om trage bewegingen van het grondvoertuig te volgen. Voor vlotte controle in meer dynamische processen, zoals het volgen van snellere voertuigen of landen op bewegende doelen, zal een meer toegewijde controller vereist zijn die rechtstreeks de hoeken en stuwkracht van de drone kan aansturen, zoals bij racedrones.
Voor de precisielanding werd gebruik gemaakt van een infraroodbaken op de grond en een camera op de drone die dit baken detecteert en de positie in beeld doorgeeft aan de flight controller. De onderstaande figuur geeft een beeld van de nauwkeurigheid van de landing. Hier werden acht achtereenvolgende precisielandingen uitgevoerd op basis van dit systeem en bedroeg de landingsfout in alle gevallen minder dan 20cm.
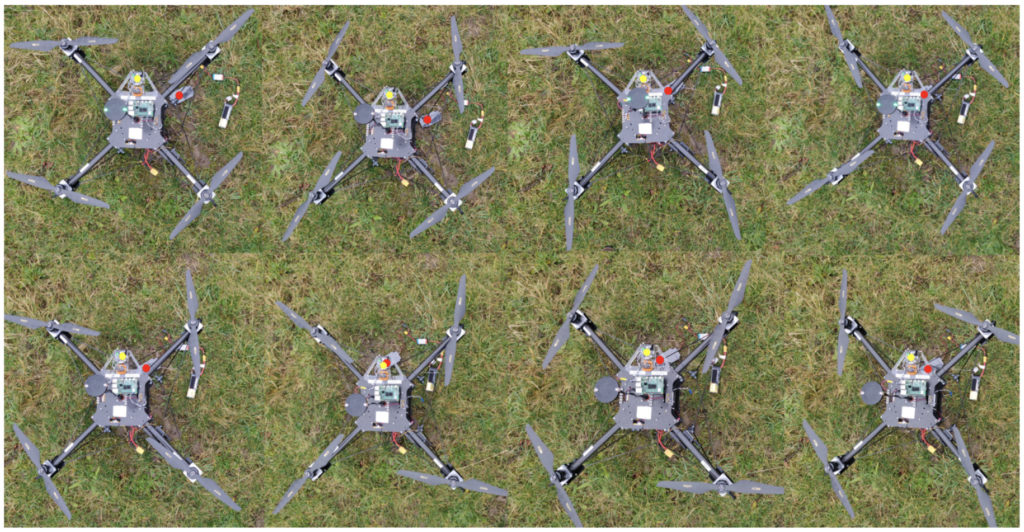
Figuur: Verschillende achtereenvolgende automatische landingen waarbij het gele punt de positie van de sensor op de drone aanduidt en het rode punt de positie van het infraroodbaken op de grond. De fout blijft kleiner dan 20cm.
Om deze laatste 20cm op te vangen werd gebruik gemaakt van een mechanisch uitlijningsysteem waarbij het landingsgestel van de drone een omgekeerde kegel vormt, die dan tijdens het landen in een cirkelvormige opening zichzelf centreert. Dit mechanisme houd de drone ook op zijn plaats tijdens het rijden wanneer de drone niet aan het vliegen is.
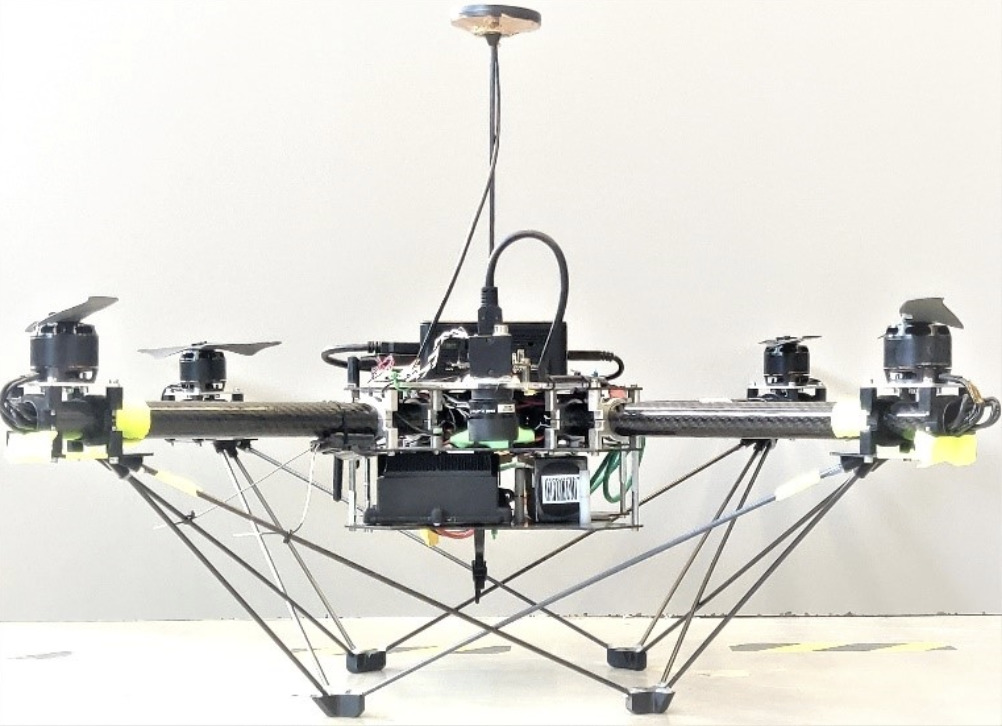
Figuur: Het landingsgestel van de drone heeft een omgekeerde kegelvorm om zo automatisch midden in de landingscirkel uit te lijnen.
Voor communicatie tussen de drone en het grondvoertuig biedt de tether naast energievoorziening ook de mogelijkheid om data door te sturen met snelheden van minstens 80Mb/s. De 5k-hogeresolutiebeelden worden door de companion computer gecomprimeerd en met 10 frames per seconde doorgestuurd via de tether naar het grondvoertuig. Om alles vanop afstand te kunnen monitoren werd ook een long-range wifi verbinding voorzien tussen het grondvoertuig en een controle station.
Verschillende sensoren kunnen op de drone gebruikt worden voor opmeting of detectie. In deze setup wordt gebruik gemaakt van een hogeresolutie RGB camera, maar ook een infraroodcamera, stereocamera of 3D-sensoren zoals een LIDAR kunnen gemonteerd worden, afhankelijk van de gewenste toepassing. Voor het sprekende voorbeeld van het detecteren van reekalfjes in lang gras dat gemaaid zal worden, wordt typisch gekeken naar infraroodcamera’s omdat deze makkelijk het warme kalfje kunnen onderscheiden van het koude gras. Om te voorkomen dat de boer tijdens het maaien de hele tijd de beelden van de infraroodcamera moet in het oog houden, zou eenvoudig algoritme op zoek kunnen gaan naar “hot spots” in beeld en een waarschuwing geven. Echter op warme of zonnige dagen zal het gras mee opwarmen en wordt het kalfje moeilijk detecteerbaar.

Figuur: Wanneer het gras niet opgewarmd is, is een reekalfje duidelijk zichtbaar op infraroodbeelden. Deze aanpak werkt echter niet op warme en zonnige dagen. Een (combinatie met) een hogeresolutie RGB camera en geavanceerde beeldverwerking zou een oplossing kunnen bieden.
Daarom zou ook een RGB camera gebruikt kunnen worden. Het nadeel hierbij is dat het kalfje gecamoufleerd is en daarom minder eenvoudig detecteerbaar wordt. Dit werd nog niet getest maar zou mogelijk kunnen zijn met een beeldverwerkingsalgoritme dat getraind is met behulp van een grote dataset.

Figuur: Enkel met goede ogen kan men op deze dronefoto een hertenkalf zien.
Nadat alle bouwblokken afzonderlijk getest zijn en met elkaar gecombineerd, toont een demonstratie de werking van het geheel. Zo zal na een startcommando de drone automatisch opstijgen naar een vaste positie boven het grondvoertuig. Vervolgens zal de drone de beweging van het grondvoertuig blijven volgen en kunnen verschillende standpunten van de drone gevraagd worden ten opzichte van het grondvoertuig. Tijdens het vliegen worden beelden geanalyseerd en doorgestuurd naar de grond. Bij wijze van demonstratie werd een reeds bestaand algoritme gebruikt om markers de detecteren (in dit geval Arucomarkers).

Figuur: Om de veiligheid van de landbouwoperaties de vergroten kan een beeldverwerkingsalgoritme op zoek gaan naar obstakels. Als eerste test werd een waarschuwing in beeld gegeven wanneer een specifieke marker gedetecteerd was.
Tether drone voor landbouwtoepassingen from EUKA Flanders Make on Vimeo.
Uit deze eerste “proof of concept” voor een tractor, gecombineerd met een drone via een kabel vatten we enkele opmerkingen samen. Zo zien we dat ver voor of naast de tractor vliegen niet mogelijk is met een tether. Hiervoor is een te grote kracht nodig om te voorkomen dat de kabel over de grond gaat slepen. Een lichtere kabel en een grotere trekkracht op de kabel kunnen dit verbeteren maar de drone zal echter deze kracht moeten kunnen leveren en zal iets schuiner moeten gaan hangen om weg te vliegen van de basis. De drone zal hierbij uiteindelijk de limiterende factor worden. Een zware drone met sterke motoren die het volle vermogen van de kabel benutten, in combinatie met een kabel die dichtbij het zwaartepunt gemonteerd is, resulteert in de grootst mogelijk horizontale afstand. Een zware drone heeft dan weer als nadeel dat het risico toeneemt en de wetgeving hier dus ook strikter in is. Een drone aan een kabel blijft nog steeds een drone volgens deze wetgeving. Naast het voor de hand liggende voordeel van permanent in de lucht blijven en betrouwbare communicatie, leek de trekkracht van de kabel ook de landingsnauwkeurigheid te verbeteren en maakt het de drone minder windgevoelig tijdens de laatste fase van de landing. Deze robuustere landing is een mogelijke denkpiste om het landen tijdens moeilijke omstandigheden, zoals op een bewegend schip tijdens stormweer, toch mogelijk te maken. Een duidelijk nadeel van het gebruik van een kabel is de beperkte bewegingsvrijheid, zeker in de nabijheid van obstakels. Een andere mogelijkheid om permanent een drone lucht te hebben, zou daarom het combineren van twee of drie drones zijn die elkaar afwisselen of een enkele drone met snelle batterijwissel of snellader wanneer de toepassing korte pauzes toelaat. Uiteindelijk zal om van deze proof-of-concept naar marktklare oplossing te gaan de drone water- en stofbestendig moeten zijn en bovendien ook een C-label moeten krijgen om te blijven voldoen aan de wetgeving.
Interesse, vragen of suggesties: de onderzoekers van Flanders Make staan u graag ten rade!
Deze demo opstelling zal alvast nog te bezichtigen zijn op 31 mei op de demonamiddag smart farming van ILVO in Merelbeke en op Dronewest22 in Oostende.
Deze proof-of-concept kadert in het proeftuin-project ‘Drones in de bouw en landbouw’
Auteur: Bart Theys