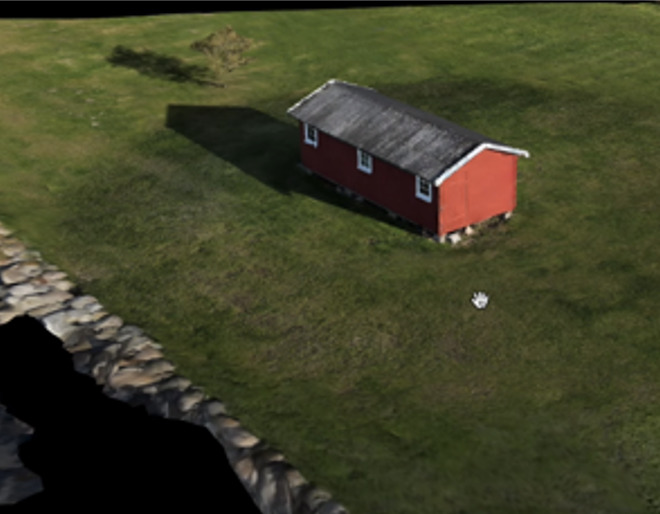
In de bouwsector worden steeds vaker 3D-reconstructietechnieken gebruikt om de exacte as-is toestand te beschrijven, ter vergelijking met de planning, het toezicht en het volgen van de voortgang van de bouw. Dergelijke 3D-reconstructies kunnen enerzijds worden gemaakt op basis van LiDAR-technologieën (Light-Detection-and-Ranging), waarbij de afstand tot elk punt gemeten wordt vanaf een gekend punt. Dankzij computervisietechnieken kunnen anderzijds ook gewone camerabeelden gebruikt worden om een 3D-model te reconstrueren op basis van verschillende overlappende 2D-aanzichten. Het 3D-model wordt berekend door driehoeksmeting van meerdere punten die in verschillende beelden terugkomen. In dit artikel lees je hoe dat in z’n werk gaat.
Dit proces wordt fotogrammetrie genoemd en verwerkt de ruwe RGB-beelden tot typisch de volgende types van voorstelling:
- XYZ geospaciale coördinaten met RGB-kleurwaardes.

- 3D mesh, waarbij punten aan het oppervlak door vlakken verbonden worden. Dit is nuttig voor 3D-visualisatie en visuele inspectie.
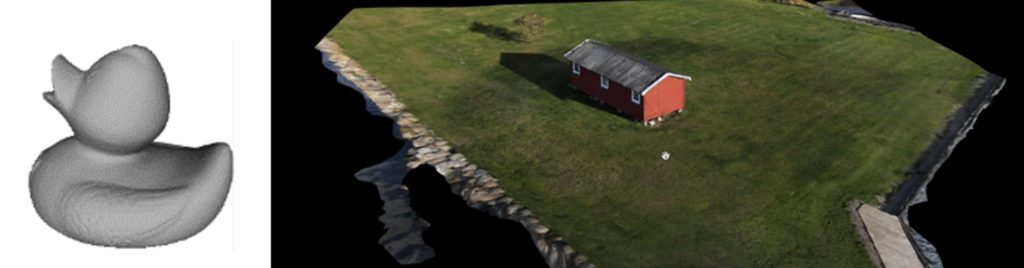
- Orthofoto’s: Luchtfoto’s worden gecorrigeerd voor vervormingen en samengesteld tot één kaart waarop afstanden nauwkeurig kunnen worden gemeten.

Hoewel laserscanners op statieven nog steeds een gebruikelijke keuze zijn, moet operator de apparaten op meerdere posities gaan opstellen om een geheel gebouw of omgeving in kaart te brengen. Dit proces kan worden geautomatiseerd door de sensoren aan een drone te bevestigen. Hoewel LiDARs steeds lichter worden, blijven het nog steeds en erg zware sensor die een behoorlijk grote drone vereist. Daarom is fotogrammetrie in vele gevallen de gekozen aanpak. Hierbij wordt gebruik gemaakt van camera , die door de band zowel lichter als goedkoper zijn dan een LiDAR. Afhankelijk van de kwaliteit van camera kan een zelfde reconstructienauwkeurigheid behaald worden.

Figure 1: fotogrammetrie versus Lidar (bron: Wingtra)
Drones laten toe gebieden te scannen die niet gemakkelijk door mensen te bereiken zijn, bijvoorbeeld voor reconstructiewerkzaamheden aan gevels van gebouwen. Anderzijds is het wellicht geen optimale keuze voor scenario’s zoals binnen in gebouwen of constructies, waar obstakels het vluchtpad belemmeren.
Wat de vereiste softwarecomponenten betreft, zijn er reeds verschillende open-source softwarepakketten beschikbaar. Deze geven aan wie er zijn weg in vindt veel controle en laten zelfs wijziging van de beschikbare code toe. Een nadeel is de vaak minder intuïtieve grafische gebruikersinterface (GUI) en de vereiste tijd om er mee aan de slag te kunnen. Twee voorbeelden hiervan zijn:
- WebODM, dat zich specifiek richt op dronebeelden. Naast de open code is het ook mogelijk te betalen voor een tijdsbesprarende installer en clouddienst.
- Meshroom en MicMac zijn meer algemene fotogrammetriesoftwares.
In ieder geval is een krachtige computer met een up-to-date grafische processor vereist om deze software te draaien. Daarom bieden de meeste commerciële programma’s een cloudservice voor verwerkingsdoeleinden zoals bijvoorbeeld:
- Pix4D Mapper en Propeller: zijn gewijd aan drone-gebaseerde kartering.Naast 3D-reconstructie biedt Pix4D ook de software voor vluchtplanning om een optimale set inputfoto’s te maken.
- 3D Zephyr en Autodesk Recap adverteren dat ze veel extra bewerkingstools hebben, bijvoorbeeld voor het vereenvoudigen van de puntenwolken. Autodesk Recap is vrij gebruikelijk in de bouwsector vanwege het algemene bouwsoftwarepakket.
- RealityCapture is een andere alternatieve softwareleverancier die fotogrammetrie verwerkt en snelle verwerkingstijden claimt.
- Airocollect is een all-in-one tool voor het capteren van data en 3D reconstructies van onder andere tuinen, gebouwen, ongelukken en infrastructuur. De tool is specifiek gericht op gebruik met kleine <250g consumentendrones, waarvoor de wetgeving het minste regels oplegt en de toepassing voor een breed publiek beschikbaar is.
- Agisoft Metashape is in de eerste plaats gericht op het genereren van puntenwolken op basis van een set foto’s met extra functies als auto-kalibratie van het cameraframe, 3D model-generatie, panorama-stiching in de Standaard versie, die bedoeld is voor interactieve media taken. De Pro versie is ontworpen geografische toepassingen met functies als aanpassen van puntenwolken en classificatie, opstellen en aanpassen van hoogte modellen, LiDAR data toevoegen, volumemetingen en veel meer.
- Bentley System Context Capture cloud service genereert 3D meshes en orthofoto’s in verschillende bestandsformaten op basis van een LiDAR puntenwolk of een set foto’s.
Uiteindelijk is alle bovenstaande software afhankelijk van de kwaliteit van de vastgelegde beelden. De nauwkeurigheid wordt voornamelijk bepaald door het aantal, de resolutie en de overlap van de beelden. Typisch worden camera’s vanaf 20 MP gemonteerd op drones die bedoeld zijn voor kartering, maar goede resultaten zijn tegenwoordig ook al mogelijk zelfs met kleine consumentendrones. De beelden moeten scherp zijn en voldoende en gelijkmatig belicht zijn. Het computeralgoritme voor fotogrammtrie werkt het best op matte oppervlakken met veel details, aangezien deze overvloedige “key points” opleveren die nodig zijn om verschillende beelden aan elkaar te linken. Hier vergemakkelijkt een grote overlap van verschillende beelden het proces. Bovendien moet het uiterlijk van het object zo constant mogelijk blijven tijdens het opnemen van de beelden, d.w.z. weinig lichtvariatie zoals op een volledig bewolkte dag is optimaal en geen bewegende objecten. Daarnaast vormen transparante objecten ook een uitdaging.
Flanders Make bekijkt samen met Buildwise op welke manier ze de drone- en bouwsector kunnen ondersteunen door middel van computervisietechnieken op dronedata.
Voor vragen rond specifieke dronetoepassingen of advies bij het selecteren van de juiste oplossingen uit de markt, laat het ons dan zeker weten via info@euka.flandersmake.be zodat we samen kunnen nadenken hierover of je in contact kunnen brengen met de juiste personen. Voor vragen specifiek voor de bouwsector, kan u terecht bij research@buildwise.be.